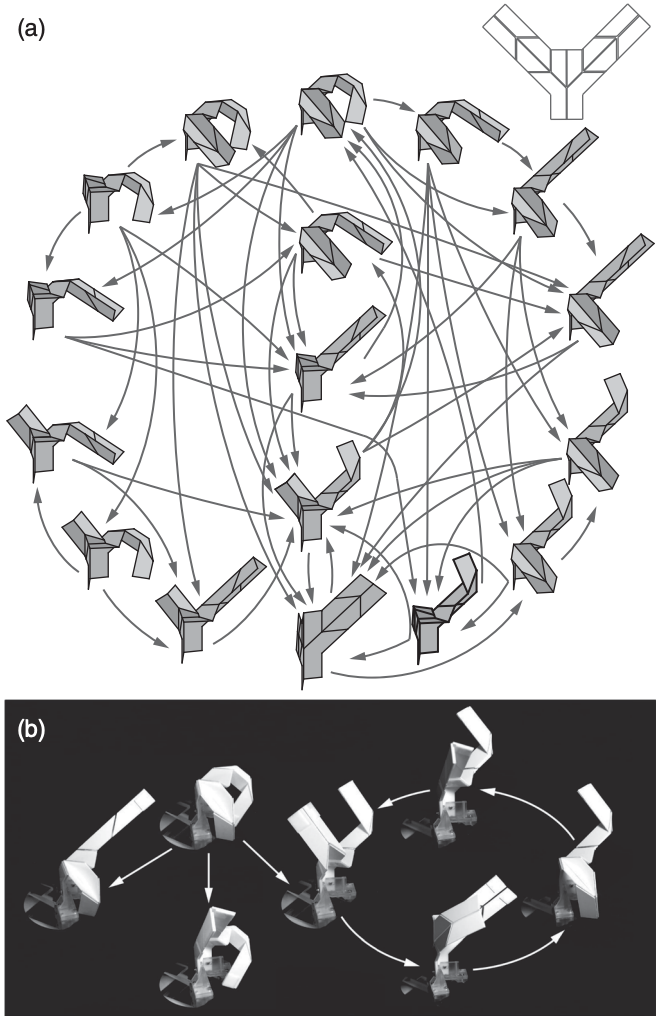
Designed & implemented multiple dynamic self-folding fingers for the “Origami Robot Gripper” project.
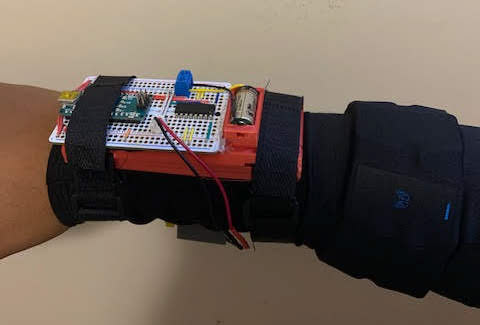
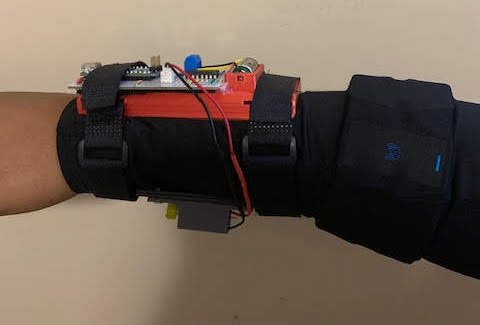
Developed active origami wrist brace for assisted typing through gesture recognition for carpal tunnel prevention.
Expeditionary Robotics Laboratory, Northeastern University - Undergraduate Researcher